Lato-Lato Kurt
Fachliche Kurzfassung

In dieser Arbeit wird das Bewegungsverhalten des Kinderspielzeugs „Lato Lato“ untersucht. Es besteht aus einem oszillierenden Aufhängungspunkt („Pivot“), an dem eine Schnur mit zwei Bällen an ihren Enden befestigt ist. Der Aufbau kann als zwei Pendel betrachtet werden, die am gleichen Pivot hängen. Durch die Oszillation des Pivots kommt es zu Kollisionen der Bälle und es entstehen verschiedene „stabile“ Bewegungszustände (stabil im Sinne einer konstanten maximalen Auslenkung).
Ziel dieser Arbeit ist es, diese stabilen Bewegungszustände genauer zu untersuchen und theoretisch zu modellieren. Zu diesem Zweck wird zunächst eine intuitive Erklärung des Phänomens gegeben und anschließend eine quantitative Modellierung vorgestellt. Außerdem werden numerische Simulationen und ein Algorithmus präsentiert, der stabile Zustände identifiziert. Ein ausgewählter stabiler Zustand wird experimentell nachgestellt und mit den Simulationsergebnissen verglichen. Abschließend werden mögliche Erweiterungen und weitere Experimente skizziert.
Motivation
Die Idee zu dieser Arbeit entstand beim Spielen mit dem Kinderspielzeug „Lato Lato“. Was zunächst als kurzweilige Beschäftigung wirkte, zeigte schnell vielschichtige physikalische Phänomene: Die einfache Mechanik eines an einem oszillierenden Pivot aufgehängten Pendels offenbart überraschend komplexe Dynamik. Besonders faszinierte mich dabei:
- Parametrische Anregung: Die Pivot-Oszillation wirkt nicht nur als externe Kraft, sondern moduliert die effektive Schwerkraft, was an das klassische Beispiel des Kapitänspendels erinnert.
- Energieübertragung durch Kollisionen: Anders als beim einfachen Fadenpendel führt der Zusammenstoß der beiden Bälle zu nichtlinearen Effekten und stabilen Bewegungszuständen – ein schönes Lehrbeispiel für nichtlineare Dynamik und Energieverlust.
- Einfachheit und Vielfalt: Trotz des minimalen Aufbaus (zwei Bälle, ein Faden, ein Motor) entstehen mehrere unterschiedliche stabile Zustände, die sich klar durch Parameter wie Frequenz, Amplitude und Fadenlänge steuern lassen.
- Praktische Relevanz: Erkenntnisse aus der Stabilitätsanalyse parametrierter Oszillatoren finden Anwendungen in Bereichen von Schwingungsdämpfung in Maschinen bis hin zu Vibrationskontrolle in der Robotik.
Aus diesen Gründen erschien es lohnenswert, das Lato Lato nicht nur als Spielzeug, sondern als ernstzunehmendes physikalisches Modell zu betrachten, das durch seine intuitive Handhabbarkeit und gleichzeitig tiefgehende Dynamik spannende Einblicke in die nichtlineare Mechanik ermöglicht.
Fragestellung
Die Leitfragen dieses Projekts lauten:
- Wie lässt sich der Einfluss des oszillierenden Pivots auf das Pendel physikalisch erklären?
- Kann man das Lato Lato theoretisch modellieren?
- Lässt sich ein stabiler Bewegungszustand experimentell nachstellen?
- Welche Bewegungsmuster treten beim Lato Lato auf?
Theorie
Stabile Zustände
Zunächst werden stabile Bewegungszustände definiert. Man betrachtet den Winkel, bei dem das Pendel kurzfristig zum Stillstand kommt – den Maximalwinkel. Bleibt dieser Winkel über die Zeit konstant, spricht man von einem stabilen Zustand. Es lassen sich drei Zustände unterscheiden:

Zustand 1 (kein Zusammenstoß): Die Bälle pendeln ohne Kollision und folgen der Pivot-Bewegung.
Zustand 2 (unterer Zusammenstoß): Kollision am unteren Umkehrpunkt; der Maximalwinkel bleibt konstant.
Zustand 3 (unterer und oberer Zusammenstoß): Kollisionen an beiden Umkehrpunkten.
Qualitative Erklärung

Beim Aufstieg der Bälle und gleichzeitigen Abwärtsbewegung des Pivots wird der Umkehrpunkt höher erreicht.
Nach dem Stillstand wirkt nur die Gravitation, weshalb die Bälle nach unten fallen.
Bewegt sich der Pivot nun nach oben, erhöht sich die effektive Beschleunigung und somit die Geschwindigkeit vor der Kollision.
Bei der nicht perfekt elastischen Kollision kann so trotz Energieverlust die kinetische Energie erhalten bleiben oder sogar zunehmen.
Quantitative Modellierung
Vorbereitende Betrachtungen

Zunächst werden wie folgt die Parameter definiert: $$\theta (t)$$ stellt den Auslenkungswinkel des Pendels in Abhängigkeit zur Zeit dar (Zeitabhängige Funktion). Weiter stellt $$p(t)$$ die Höhe des Pivots in Abhängigkeit zur Zeit dar (Zeitabhängige Funktion). Das Koordinatensystem wird so definiert, dass der Pivot um den Punkt $$(0,l)$$ osziliert. Da weiter die Oszilation des Pivots als Sinusfunktion verstanden wird gilt: \begin{equation*} p(t)=a\cdot\sin(\omega t + \alpha)+l, \end{equation*} wobei $$a$$ die Amplitude des Pivots, $$\omega$$ die Kreisfrequenz des Pivots und $$\alpha$$ die Phasenverschiebung des Pivots darstellen. Weiter kann die Position der Bälle unter Nutzung von $$\theta(t)$$ und Trigonometrie, wie folgt bestimmt werden: \begin{align*} x(t)&=\sin(\theta(t))l\\ y(t)&=p(t)-\cos(\theta(t))l \end{align*}

Annahmen

Folgende Annahmen werden in der theoretischen Modellierung genutzt:
- Reibung ist vernachlässigbar (Kinetische Energie wird bei Kollision verhältnismäßig so viel kleiner, dass Reibung vernachlässigbar ist).
- Der Faden ist masselos.
- Die Massen der beiden Bälle ist gleich.
- Symmetrie der Beiden Bälle wird angenommen, sodass ein Freiheitsgrad $$\theta(t)$$ die Auslenkung beider Teilpendel beschreibt.
- Die Fäden deformieren nicht und haben eine konstante Länge $$l$$.
Die letzte Annahme ist nur zutreffend bei Auslenkungswinkeln bis $$90^{\circ}$$. Bis zu diesem Punkt ist die Zentripetalkraft, so groß, dass der faden straff ist.
Euler-Lagrangian Gleichung
Zur Modellierung des Lato Latos werden die Euler-Lagrangian Gleichung genutzt. Diese lautet für einen Freiheitsgrad $$\theta(t)$$: \begin{equation} \frac{d}{dt}\left(\frac{\partial L}{\partial \theta(t)}\right)-\frac{\partial L}{\partial \theta(t)}=0 \end{equation} Dabei steht $$L$$ für den Lagrangian und ist als Different zwischen Kinetischer und Potentieller Energie definiert: $$L=T-V$$.
Bestimmung der Kinetischen Energie $$T$$
Zur Übersichtlichkeit wird im Folgenden mit $$\theta$$, $$\theta(t)$$ und mit $$p$$, $$p(t)$$ gemeint. Für die Kinetische Energie gilt: \begin{equation*} T = \frac{1}{2}mv(t)^2 \end{equation*} Um die Geschwindigkeit der Bälle zu bestimmen wird über die $$x-Position$$ $$x(t)$$ und die $$y-Position$$ $$y(t)$$ zeitlich abgeleitet. Man erhält: \begin{align*} \dot{x}(t) &= l\cos\big(\theta\big)\dot{\theta}\\ \dot{y}(t) &= \dot{p} + l\sin\big(\theta\big)\dot{\theta} \end{align*} Da weiter $$v(t)^2=\dot{x}(t)^2+\dot{y}(t)^2$$ gilt, folgt für $$v(t)^2$$: \begin{align*} \dot{x}(t)^2 &= l^2\cos^2\big(\theta\big)\dot{\theta}^2\\ \dot{y}(t)^2 &= \dot{p}^2 + l^2\sin^2\big(\theta\big)\dot{\theta}^2 + 2l\dot{p}\sin\big(\theta\big)\dot{\theta}\\ v(t)^2 &= l^2\cos^2\big(\theta\big)\dot{\theta}^2+\dot{p}^2 + l^2\sin^2\big(\theta\big)\dot{\theta}^2 + 2l\dot{p}\sin\big(\theta\big)\dot{\theta}\\ &=l^2\dot{\theta}^2\left(cos^2\big(\theta\big)+sin^2\big(\theta\big)\right)+\dot{p}^2 +2l\dot{p}\sin\big(\theta\big)\dot{\theta}\\ &=l^2\dot{\theta}^2+\dot{p}^2 +2l\dot{p}\sin\big(\theta\big)\dot{\theta}\\ \end{align*} Somit gilt für $$T$$: \begin{equation*} T = \frac{1}{2}mv\left(l^2\dot{\theta}^2+\dot{p}^2 +2l\dot{p}\sin\big(\theta\big)\dot{\theta}\right) \end{equation*}
Bestimmung der Potentiellen Energie
Für die Potentielle Energie gilt: \begin{equation*} V = mgh \end{equation*} Da die Höhe der Bälle $$y(t)$$ entspricht, gilt: \begin{equation*} V = mg\left(p-\cos(\theta)l\right) \end{equation*}
Bestimmung des effektiven Lagrangians
Für den Lagrangian gilt: \begin{align*} L &= T-V\\ &=\frac{1}{2}mv\left(l^2\dot{\theta}^2+\dot{p}^2 +2l\dot{p}\sin\big(\theta\big)\dot{\theta}\right)-mg\left(p-\cos(\theta)l\right)\\ &=\frac{1}{2}mvl^2\dot{\theta}^2+\frac{1}{2}mv\dot{p}^2 +mvl\dot{p}\sin\big(\theta\big)\dot{\theta}-mgp+mg\cos(\theta)l \end{align*} Weiter wird der effektiver Lagrangian betrachtet welcher nur aus Termen besteht, die Abhängig vom Freiheitsgrad sind. Somit können alle Terme ohne $$\theta$$ und $$\dot{\theta}$$ beim effektiven Lagrangian gekürzt werden. \begin{align*} L_{eff} &=\frac{1}{2}mvl^2\dot{\theta}^2+mvl\dot{p}\sin\big(\theta\big)\dot{\theta}+mg\cos(\theta)l \end{align*}
Auswertung der Euler-Lagrange Gleichung
Anschließend kann der effektive Lagrangian in die Euler-Lagrange Gleichung eingesetzt werden: \begin{equation} \frac{d}{dt}\left(\frac{\partial L_{eff}}{\partial \dot{\theta}}\right)-\frac{\partial L_{eff}}{\partial \theta}=0 \end{equation} wobei für den effektiven Lagrangian zukünfitig $$L_{\theta}$$ gilt: \begin{align*} L_{\theta}:=L_{eff} = \underbrace{\tfrac12 m l^2 \dot\theta^2}_{L_1} + \underbrace{m l\,\dot p\,\sin\theta\,\dot\theta}_{L_2} + \underbrace{m g l\cos\theta}_{L_3} \\ \end{align*} Man leite $$L_{\theta}$$ partiell nach $$\dot\theta$$ ab, indem man die Summanden einzeln partiell nach $$\dot\theta$$ ableitet und addiert: \begin{align*} \frac{\partial L_{\theta}}{\partial \dot\theta} &= \frac{\partial L_1}{\partial \dot\theta} + \frac{\partial L_2}{\partial \dot\theta} + \frac{\partial L_3}{\partial \dot\theta}. \end{align*} \begin{align*} \frac{\partial L_1}{\partial \dot\theta} = \frac{\partial}{\partial \dot\theta}\bigl(\tfrac12 m l^2 \dot\theta^2\bigr) = m l^2 \dot\theta,&& \frac{\partial L_2}{\partial \dot\theta} = \frac{\partial}{\partial \dot\theta}\bigl(m l\,\dot p\,\sin\theta\,\dot\theta\bigr) = m l\,\dot p\,\sin\theta,&& \frac{\partial L_3}{\partial \dot\theta} = \frac{\partial}{\partial \dot\theta}\bigl(m g l\cos\theta\bigr) = 0 \end{align*} \begin{align*} \frac{\partial L_{\theta}}{\partial \dot\theta}= m l^2 \dot\theta+ m l\,\dot p\,\sin\theta \end{align*} Man leite nun nach der Zeit ab und erhalte: \begin{align*} \boxed{\frac{d}{dt}\Bigl(\frac{\partial L_{\theta}}{\partial \dot{\theta}}\Bigr)= m l^2 \ddot\theta+ m l\Bigl(\ddot p\,\sin\theta + \dot p\,\cos\theta\,\dot\theta\Bigr)} \end{align*} Man leite $$L_{\theta}$$ partiell nach $$\theta$$ ab, indem man die Summanden einzeln partiell nach $$\theta$$ ableitet und addiert: \begin{align*} \frac{\partial L_{eff}}{\partial \theta} &= \frac{\partial L_1}{\partial \theta} + \frac{\partial L_2}{\partial \theta} + \frac{\partial L_3}{\partial \theta}. \end{align*} \begin{align*} \frac{\partial L_1}{\partial \theta} &= \frac{\partial}{\partial \theta}\bigl(\tfrac12 m l^2 \dot\theta^2\bigr) = 0, \frac{\partial L_2}{\partial \theta} &= \frac{\partial}{\partial \theta}\bigl(m l\,\dot p\,\sin\theta\,\dot\theta\bigr) = m l\,\dot p\,\cos\theta\,\dot\theta, \frac{\partial L_3}{\partial \theta} &= \frac{\partial}{\partial \theta}\bigl(m g l\cos\theta\bigr) = - m g l\sin\theta \end{align*} \begin{align*} \boxed{\frac{\partial L_{\theta}}{\partial \theta} = m l\,\dot p\,\cos\theta\,\dot\theta \;-\; m g l\sin\theta.} \end{align*}
Setzt man dies in die Euler Lagrange Gleichung ein, erhält man: \begin{align*} \frac{d}{dt}\Bigl(\frac{\partial L_{\theta}}{\partial \dot{\theta}}\Bigr) - \frac{\partial L_{\theta}}{\partial \theta}=\Bigl[m l^2 \ddot\theta + m l\bigl(\ddot p\,\sin\theta + \dot p\,\cos\theta\,\dot\theta\bigr)\Bigr] - \Bigl[m l\,\dot p\,\cos\theta\,\dot\theta - m g l\sin\theta\Bigr] \\ &\quad=0. \end{align*} Die \(m l\,\dot p\,\cos\theta\,\dot\theta\)-Terme heben sich auf, sodass Folgendes gilt: \[ m l^2\ddot\theta + m l\,\ddot p\,\sin\theta + m g l\sin\theta = 0 \;\xrightarrow{\div ml}\; l\ddot\theta + \sin\theta\,( \ddot p + g ) = 0. \] Mit \(\ddot p = -a\omega^2\sin(\omega t+\alpha)\) folgt \[ \boxed{l\ddot{\theta}(t) + \sin\bigl(\theta\bigr)\bigl(g - a\omega^2\sin(\omega t+\alpha)\bigr) = 0.} \]
Kollisionsmodelierung

Bei der Kollision handelt es sich um eine nicht perfekt elastische Kollision. Somit kann durch folgende Gleichung die Geschwindigkeit direkt nach der Kollision $$t^+$$ unter Nutzung der Geschwindigkeit direkt vor der Kollision $$t^-$$ bestimmt werden: \begin{equation*} \dot{\theta}(t^+) = -\gamma\,\dot{\theta}(t^-) \end{equation*} Dabei ist $$\gamma$$ der Restetutionskoeffizient. Um zu bestimmen, wann eine Kollision passiert, werden die Winkel bestimmt, bei denen sich die Bälle unten berühren $$\theta_{min}$$ und bei welchem sie sich oben berühren $$\theta_{max}$$: \begin{align*} \theta_{min} &= \arcsin\!\frac{r}{l}\\ \theta_{max} &= \pi - \arcsin\!\frac{r}{l} \end{align*}
Anwendung der Bewegungsgleichung


Die Bewegungsgleichung ist nur numerisch lösbar und wird in der Sprache Julia wird mithilfe der Tsit5 Methode implementiert. Dort wird auch die Kollisionsbedingung und deren Effekt angewendet. Dabei werden für jede numerische Berechnung die Anfangsbedingungen: der Anfangswinkel die Anfangswinkelgeschwindigkeit benötigt. Weiter wird auch ein Programm genutzt, welches stabile Zustände basierend auf der gerade vorgestellten numerischen Simulation findet. Besonderer Fokus wird auf das Finden des zweiten stabilen Zustands gelegt. Als Anfangsbedingungen für die Simulation wird dabei für den Anfangswinkel der maximale Auslenkungswinkel genutzt. Für die Anfangswinkelgeschwindigkeit wird 0 genutzt, da am Anfang als Auslenkungswinkel der maximale Winkel gegeben ist und somit die Bälle bei diesem Winkel in Stillstand sind. Iteriert man anschließend über mögliche Frequenzen, finden man schließlich eine Simulation bei der der maximale Winkel konstant bleibt.
Charakterisierung der Bewegungsmuster
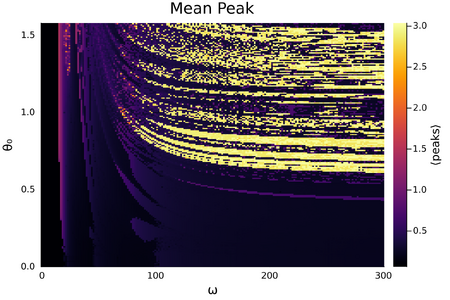
Durchschnittlicher Maximalwinkel
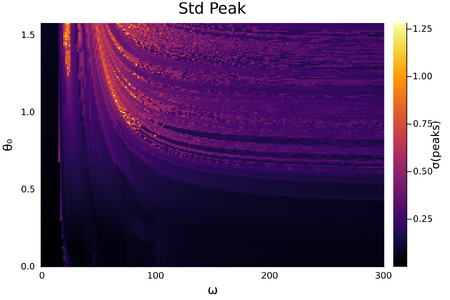
Standardabweichung des Maximalwinkels


Im ersten Diagramm zeigt ein Gitter aus Kreisfrequenzen und Anfangsauslenkungen den durchschnittlichen Maximalwinkel. Die diagonale Linie kennzeichnet den zweiten stabilen Zustand. Im zweiten Diagramm markieren dunkle Regionen stabile, helle Regionen instabile Bewegungen.
Experiment


Ein LEGO-basierter Oszillator wandelt die Motorrotation in eine lineare Pivot-Oszillation um. An diesem ist der Faden mit den Bällen befestigt. Mithilfe einer Plexiglasplatte werden zunächst Anfangsauslenkung und Frequenz justiert, um den zweiten stabilen Zustand zu erreichen. Anschließend wird die Frequenz schrittweise angepasst, sodass das Pendel in neue stabile Zustände einschwingt, bis das gesamte Frequenzspektrum abgearbeitet ist. Die Bewegung wird via Video-Tracking aufgezeichnet.
Ergebnisse
Tracking-Daten liefern Pivot- und Ballkoordinaten. Aus den Pivot-Daten werden ($$\omega$$, $$a$$, $$\alpha$$) bestimmt, aus den Ballkoordinaten die Auslenkungswinkel. Vergleiche mit Simulationen:





Die Ergebnisse bestätigen: Je kleiner die Kreisfrequenz, desto größer die Pendelperiode und der Maximalwinkel. Verschiedene Fadenlängen zeigen denselben Trend:

Helle Kurven stehen für längere Fäden. Mit zunehmender Fadenlänge sinkt die nötige Frequenz für einen gegebenen Maximalwinkel.
Ergebnisdiskussion
Leichte Asymmetrien zwischen Theorie und Experiment lassen sich durch folgende Fehlerquellen erklären:
Schwerpunkte der Bälle nicht exakt in der Mitte (Hakenmasse).
Fadenaufhängung um <1 mm verschoben.
Nachgiebigkeit des LEGO-Oszillators.
Video-Blur und Kompression bei Slow-Motion: ±2 px Unsicherheit.
Submillimetergenauigkeit im Tracking (Kantenerkennung).
Diese Fehler sind jedoch gering genug, um die Hauptaussagen nicht zu beeinträchtigen.
Fazit und Ausblick
Fazit
In dieser Arbeit wurde das Kinderspielzeug „Lato Lato“ theoretisch und experimentell untersucht. Ein Lagrange-Modell mit oszillierendem Pivot und nicht perfekten Kollisionen erklärt drei stabile Bewegungszustände. Numerische Simulationen und ein stabiler-Zustands-Algorithmus identifizierten insbesondere den zweiten stabilen Zustand. Experimentelle Messungen bestätigten die Vorhersagen: Bei sinkender Pivotfrequenz wächst der Maximalwinkel, bei längeren Fäden sinkt die benötigte Frequenz für denselben Winkel. Kleinere Abweichungen lassen sich durch systematische Versuchsfehler erklären.
Ausblick
Präzisere Messtechnik: Hochauflösende Kameras und verbesserte Tracking-Algorithmen reduzieren Messunsicherheiten weiter.
Modellerweiterung: Berücksichtigung von Luftwiderstand, Fadenmasse und nichtlinearer Reibung.
Weitere stabile Zustände: Experimentelle Analyse auch von Zustand 1 und 3.
Parametrische Studien: Systematische Variation von Ballradius, Fadenlänge und Pivot-Amplitude.
Anwendungen: Übertragung der Erkenntnisse auf gekoppelte Oszillatoren in der Robotik oder Schwingungstechnik.